The Drone Workflow That Scales: Turning Flight Data Into Better Products
The Drone Workflow That Scales: Turning Flight Data Into Better Products

The drone industry has no shortage of innovation. New airframes, new sensors, new autonomy stacks, new payloads, and new business models are arriving faster than ever. But as the market matures, one question matters more than any single hardware or software choice: which companies can improve their systems the fastest?
In practice, that comes down to the data flywheel.
The companies that win in drones will not just be the ones with clever autonomy or lower-cost hardware. They will be the ones who can move quickly from flight data to engineering insight, from engineering insight to product improvement, and from product improvement back into the field. The faster that loop runs, the faster teams can debug, validate, deploy, and scale. For drone companies, that translates directly into business outcomes: shorter development cycles, fewer field failures, lower support costs, faster customer onboarding, and a stronger product story in a competitive market.
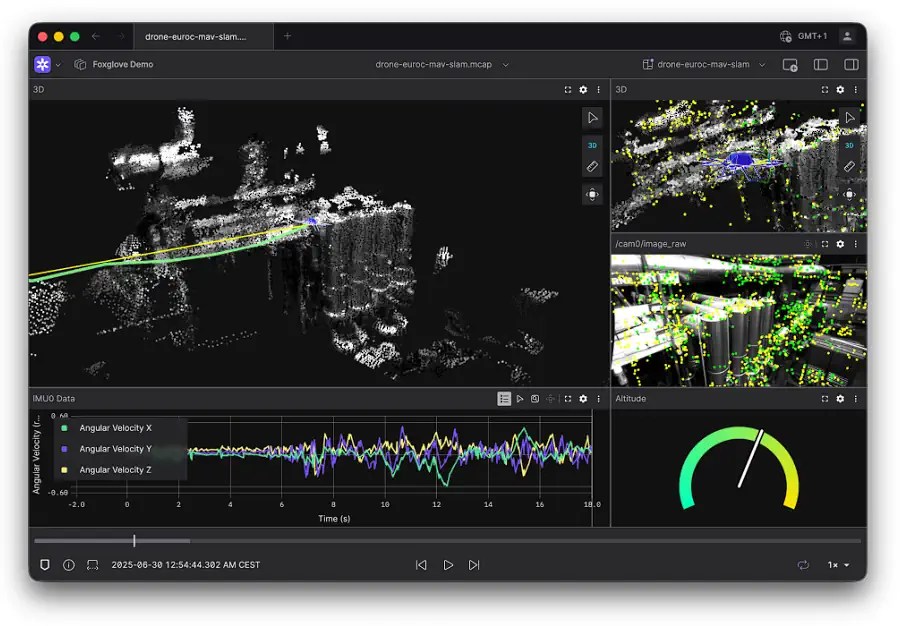
At Foxglove, we think about that loop as a practical workflow, not an abstract concept. Record. Ingest. Process. Visualize. Collaborate. Repeat. Foxglove is built around exactly that model, helping robotics teams collect, organize, and analyze multimodal log data such as time series, video, maps, 3D data, and text logs, then turn those recordings into faster debugging and better decisions. Foxglove also supports common robotics and drone-adjacent formats, including MCAP, ROS bags, and ULog, with tools for streaming live data, indexing logs by device, time, and topic, and sharing repeatable layouts across teams.
For drone workflows, that matters because the engineering problem is rarely one-dimensional. A failed mission, unstable controller, perception error, or autonomy edge case usually cannot be understood from a single graph or log line. Teams need context. They need to see the vehicle state, mission timeline, GPS path, camera stream, estimator output, actuator behavior, and relevant system logs together. Foxglove’s approach is to make that multimodal context available in one place, so teams can understand how the vehicle sensed, thought, and acted during a flight. For PX4-based workflows in particular, Foxglove provides a PX4 converter extension that translates selected uORB messages so they can be visualized in panels such as Map and 3D, making flight-log analysis more accessible and easier to standardize across teams.
That capability is useful at every stage of the drone lifecycle.
During development, Foxglove helps engineering teams troubleshoot faster. Instead of moving between custom scripts, spreadsheets, video files, and disconnected dashboards, teams can inspect synchronized data in a unified interface. A controls engineer can investigate estimator drift while a perception engineer reviews video and 3D context from the same flight. A firmware team can compare logs before and after a change. A QA or flight-test lead can use shared layouts to standardize how incidents are reviewed across the organization. When analysis becomes repeatable, organizations spend less time reproducing issues and more time fixing them.

During validation, the data flywheel becomes even more important. Drone companies need more than successful test flights. They need evidence that changes actually improve the system and do not introduce regressions. That is true whether the product is an ISR platform, an inspection drone, a docked drone solution, or a delivery system. Validation depends on being able to retrieve the right logs, compare behavior over time, annotate incidents, and share findings quickly across engineering and operations. Foxglove’s workflows around indexed recordings, metadata, events, layouts, API access, and collaboration are built for exactly that kind of disciplined iteration.
During deployment, the business case becomes even clearer. Every field issue has a cost. It can delay a launch, consume scarce engineering time, trigger customer escalations, or weaken confidence in the platform. Every extra day spent trying to reconstruct what happened in flight is a day not spent shipping improvements. A strong data workflow reduces that drag. When teams can retrieve only the data they need, inspect it quickly, and collaborate around a shared source of truth, they can close the loop faster between operational issues and engineering action. Foxglove explicitly supports retrieving targeted data through the UI, API, and CLI, which helps teams explore incidents efficiently instead of treating every investigation as a manual process.
This is especially important as drone companies scale beyond a single platform or pilot program. One of the biggest traps in the industry is building workflows that are too tightly coupled to one airframe, one autopilot, or one narrow use case. sUAS operators are already seeing how fragile that can be when supply chains, compliance requirements, or hardware choices change. The more durable advantage is a workflow that is standardized, repeatable, and hardware-independent enough to evolve with the business. That same logic applies inside engineering organizations. The goal is not just to fly one mission successfully. It is to build an operating system for learning from every mission. sUAS News recently made a similar point from an operator perspective, arguing that the most valuable asset in a drone program is the standardized, repeatable workflow, not the specific drone hardware in use.
For commercial drone companies, this is where engineering discipline and business performance intersect.
A faster data flywheel means fewer wasted flight hours spent reproducing known issues. It means quicker root-cause analysis when customers hit problems in the field. It means faster iteration on autonomy, perception, and mission software. It means better internal alignment between software, flight test, operations, and customer teams. And it means a stronger story for buyers: not just that the product works today, but that the company behind it can improve it quickly, validate it rigorously, and support it at scale.
That matters in every drone market. Inspection providers need reliability and repeatability. Docked-drone platforms need efficient incident review, strong security posture, and scalable operational workflows. Defense and public safety teams need a rapid understanding of system behavior under changing conditions. OEMs and autonomy vendors need tooling that helps them move from flight test to product maturity faster. Across all of these categories, the pattern is the same: the winners are the teams that learn the fastest. Public messaging across the drone sector increasingly reflects this broader shift toward workflow efficiency, edge processing, scalable data handling, and hardware-independent operations.
Foxglove is a natural fit for drone workflows because the platform helps teams work with the data they already have, in the formats they already use, and build a faster path from raw flight recordings to actionable engineering insight. It helps turn debugging into a repeatable workflow instead of an ad hoc exercise. And it helps drone companies build the kind of data flywheel that compounds over time: every mission generates a better understanding, every improvement makes the next deployment stronger.
In drones, the moat is not just the airframe. It is not just the autonomy stack. It is how quickly your organization can learn from the real world.
The fastest data flywheel wins.
Related
Discover more from sUAS News
Subscribe to get the latest posts sent to your email.